How to store multiple poses? - General Application Help: How do I? - Universal Robots Forum

By A Mystery Man Writer
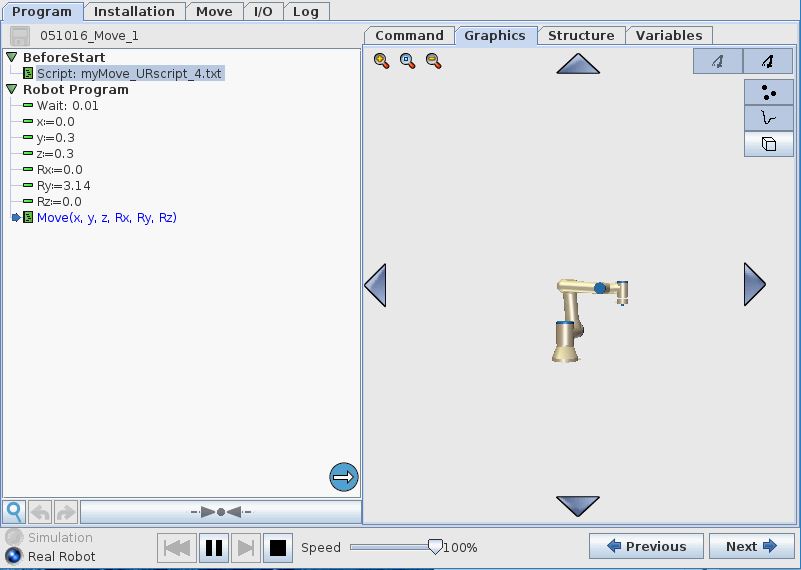
Hi, I need to store multiple positions/poses of the robot to access them later in the program. The number of positions depends on the user input - the query works perfectly. I thought I could just make a loop and fill each pose into an array but it does not work. I know how to store a pose in a single variable but in my application the user decides how many poses he needs to store. Can anyone shed some light here? Thanks and best regards Stephan PS: oh and where can I change my username to
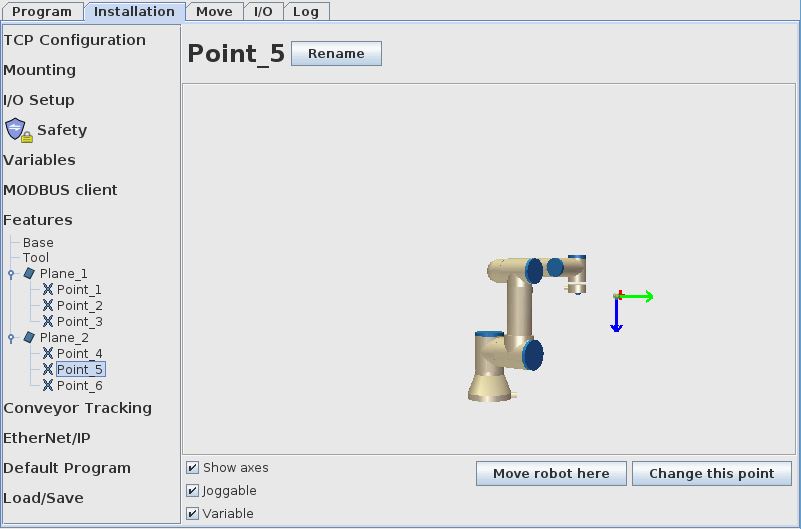
Planes and position variables 2 – UR Forum-Help-Q&A

media.springer/full/springer-static/imag
Planes and position variables 2 – UR Forum-Help-Q&A
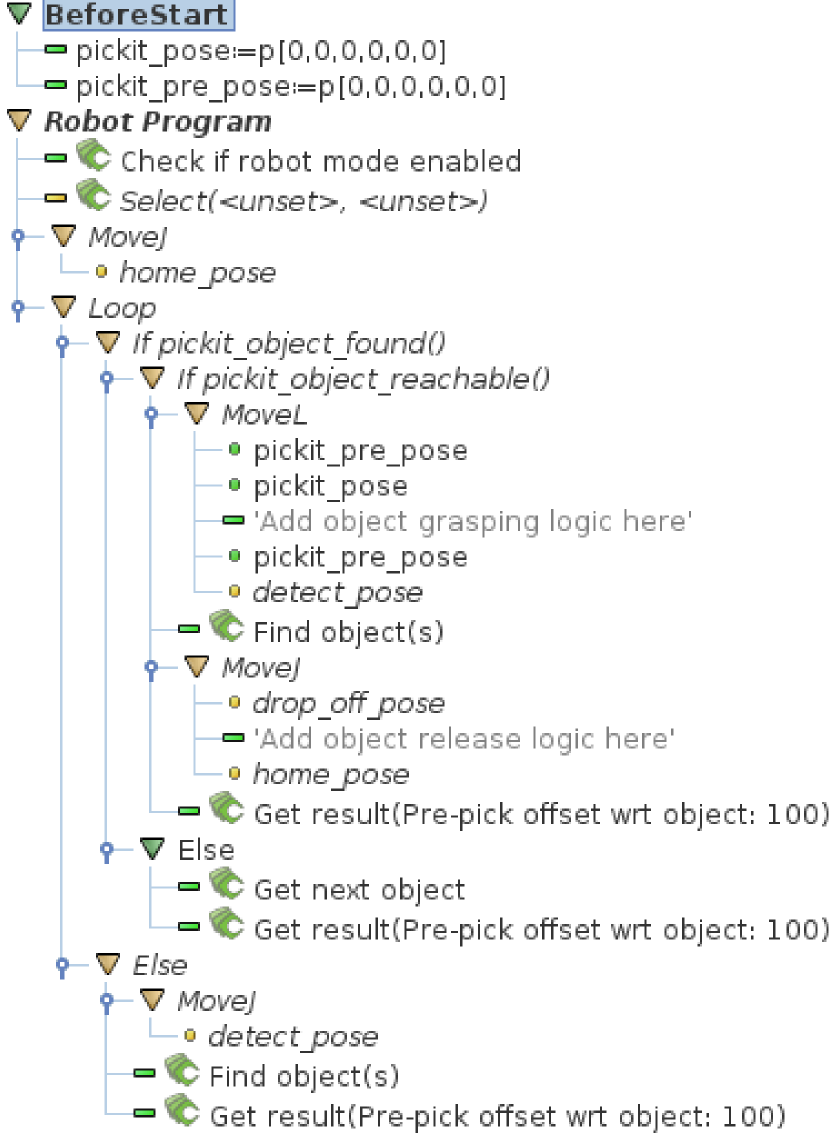
Universal Robots URCap example picking program — Pickit 1.10 documentation

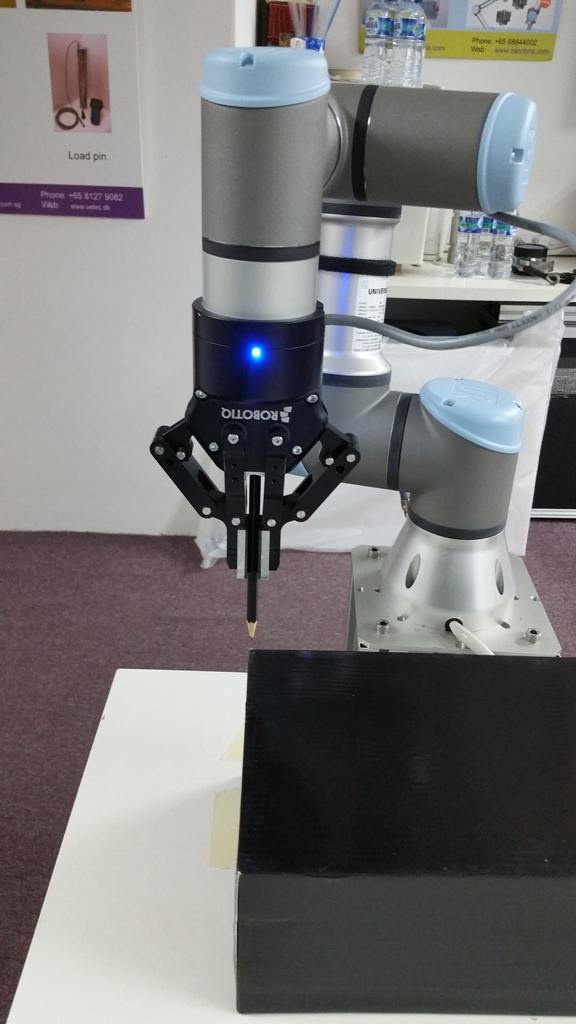
Basic UR – Lesson 1 – Teach Waypoints. – UR Forum-Help-Q&A
New Report: Risky Analysis: Assessing and Improving AI Governance Tools

UR Programming Functions: – UR Forum-Help-Q&A
UR Programming Functions: – UR Forum-Help-Q&A

Move with Offset - Product Wishlist - Universal Robots Forum

Move the robot to the position which is sent from the PLC - General Application Help: How do I? - Universal Robots Forum
How to Control Two Universal Robots (UR-5) in the same Simulation Window - ROS for Industrial Robots 101 - The Construct ROS Community
Release of URCap SDK 1.11.0, Polyscope 5.9 and 3.14 - UR News & Announcements - Universal Robots Forum

Relative turn movement around TCP coordinate system - URScript - Universal Robots Forum

Industrial Robots, Fundamentals of Industrial Robots
Robotics, Free Full-Text
- COPIER]|PAPER, AND TIME SAVING FUNCTIONS|BP-70M65|03-03_002|manual download|MFP / Copier / Printer products|Office solution: Sharp
- Curling Canada Canada part of three-way tie at top of 2014 Ford Worlds

- LGTG01-BG Fashion Faux MONOGRAM 2 Piece Luggage Set

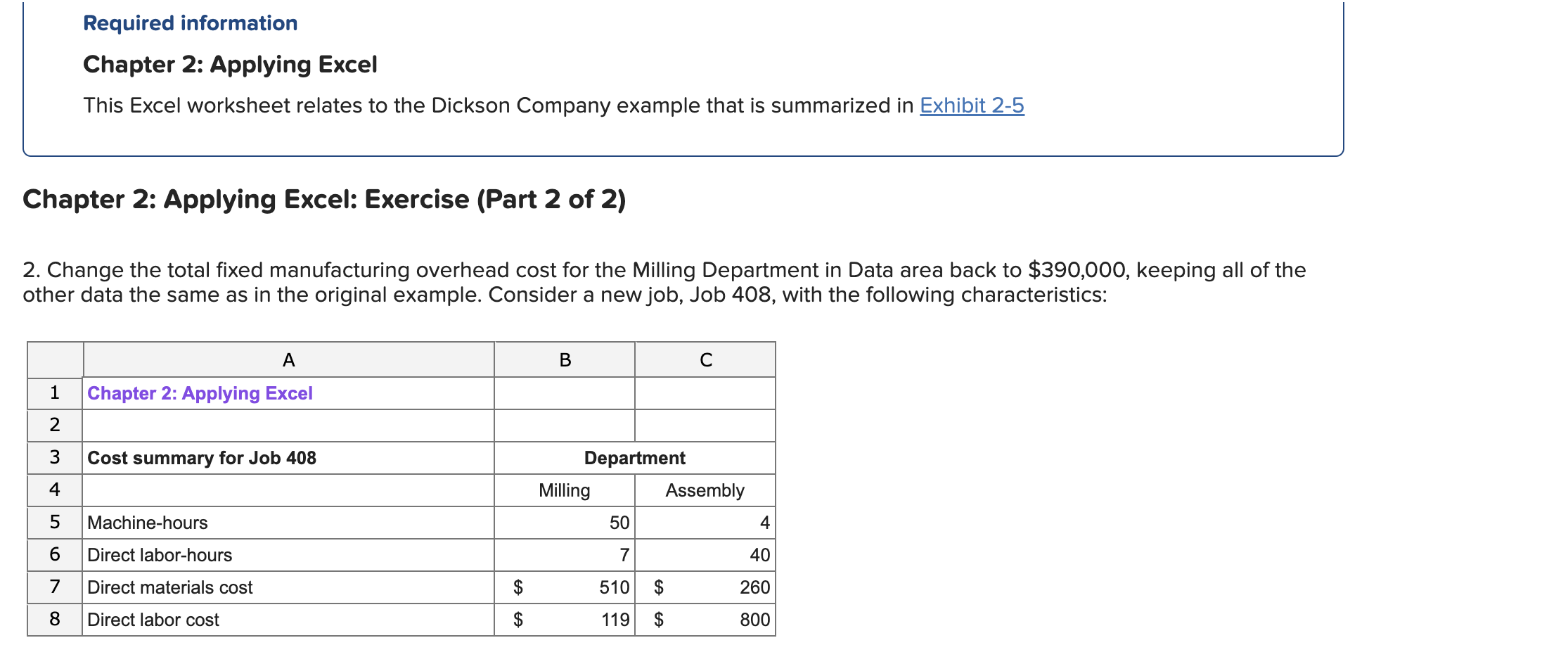
- Solved Required information Chapter 2: Applying Excel This
- Raymond 2 Piece Suit Checkered Men Suit - Buy Raymond 2 Piece Suit Checkered Men Suit Online at Best Prices in India

- Levi's® Men's 501 Original Straight Fit Jeans 40 x 30 Black

- Shapewear & Fajas The Best Faja Fresh and Light Faja Mujer Moldeadora Colombiana Girdle for women Seamless Anti-slip Band Open Bust Underbust Boyshort

- Jean Coutu Monsaintroch

- Shooting House Of Kolor Kandy Brandywine

- 12 ways to wear the timeless Chanel jacket
