The powered simple walking model. (a) A hip spring is attached

By A Mystery Man Writer

The 3 Best Walkers of 2024

The reference limit cycle (red) and the actual solution (blue) for all

Margins of stability as a function of walking speed between 1.0 and
118372 PDFs Review articles in WALKING

Hip Injuries in Gymnastics - A Complete Guide
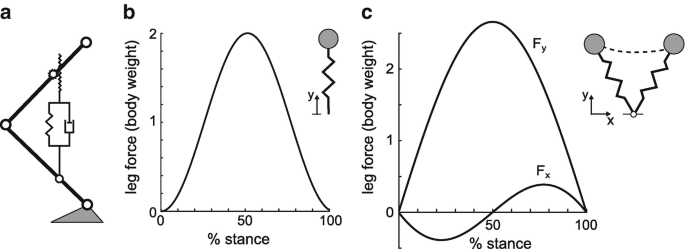
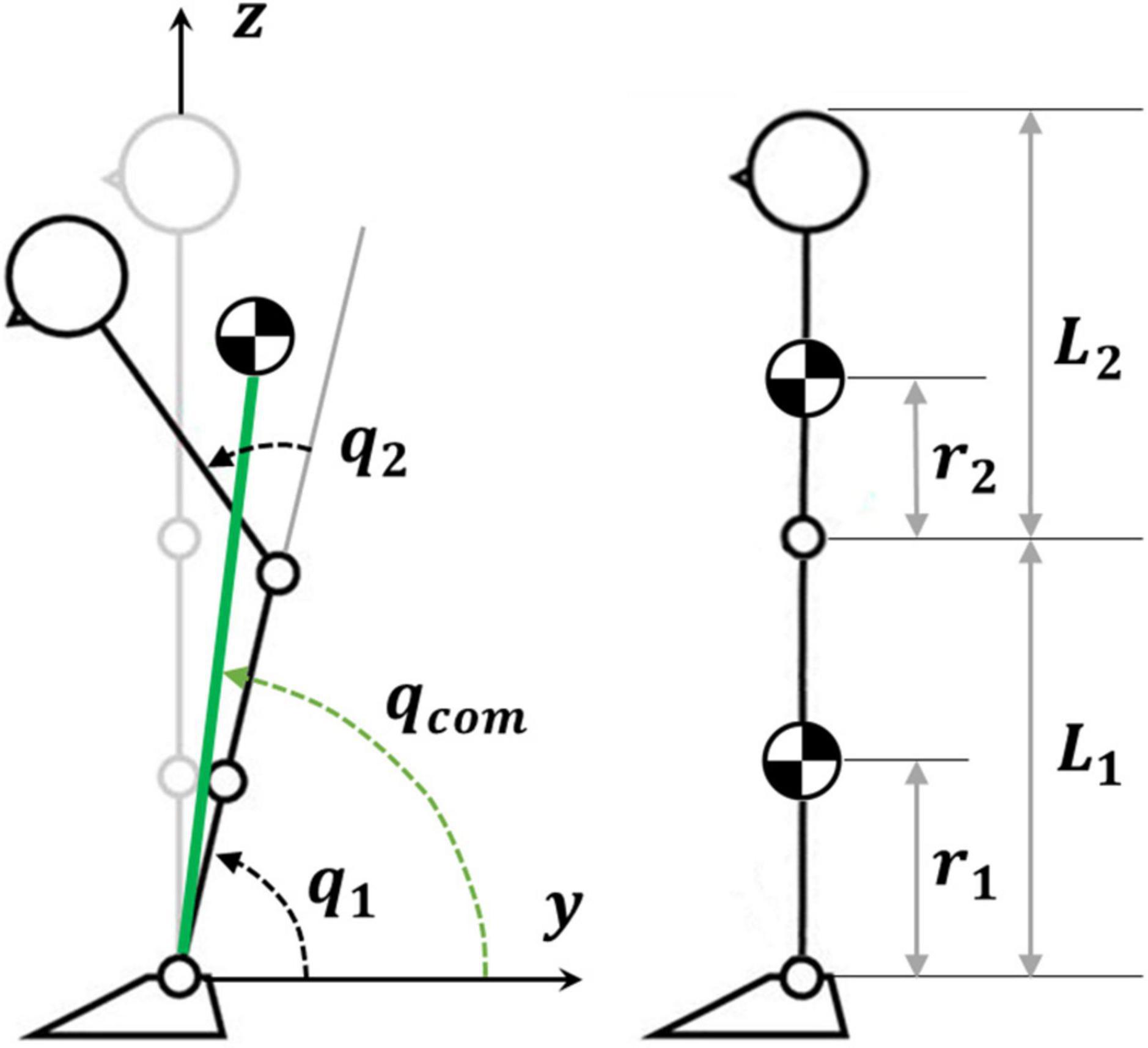
Gait Based on the Spring-Loaded Inverted Pendulum

Cornell Ranger is an electrically-powered four-legged bipedal robot.
Frontiers Integrating ankle and hip strategies for the stabilization of upright standing: An intermittent control model
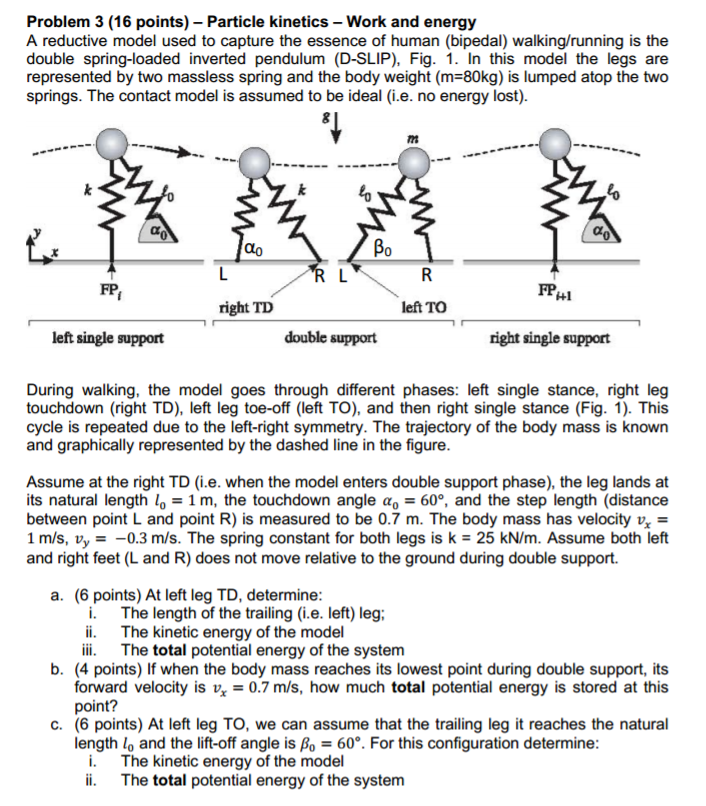
Solved A reductive model used to capture the essence of

The bipedal spring-mass model. The model has two independent, massless

The 2022 SELF Outdoor Awards

190194 PDFs Review articles in GAIT

Investigation of the relationship between steps required to stop and propulsive force using simple walking models - ScienceDirect

SLR speeds for walking and running for both experiments. Data points

Snapshots of the simulated bipedal robot. (A) 0.5 m/s (B) 0.8 m/s (C)
- YAO FEI Women's Stretch High Waist Jeans Big Butt Hip Lift Jeans Jeans Pull Up Jeans Slim Women's Trousers Multi-Size Spring Summer Autumn (Color : Light BLue, Size : XL) :

- HiP Paris Blog, Swagger in Paris, Parisian Male in the Spring and summer

- European And American Style Sexy Stitching Love Peach Hip High

- Physical Therapy in Reading, Sinking Spring, Wernersville, Berks
- Primavera Organic Rose Hip Seed Oil - Goddess Of Spring





