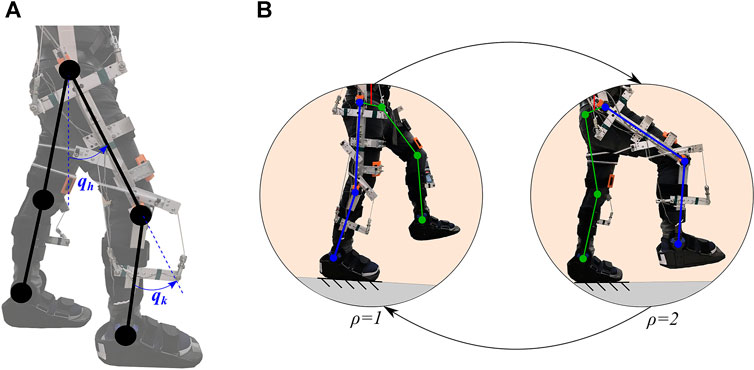
The two-segment leg has a torque-controlled actuator at the hip, and a

By A Mystery Man Writer

The two-segment leg has a torque-controlled actuator at the hip

PDF) An Open Torque-Controlled Modular Robot Architecture for
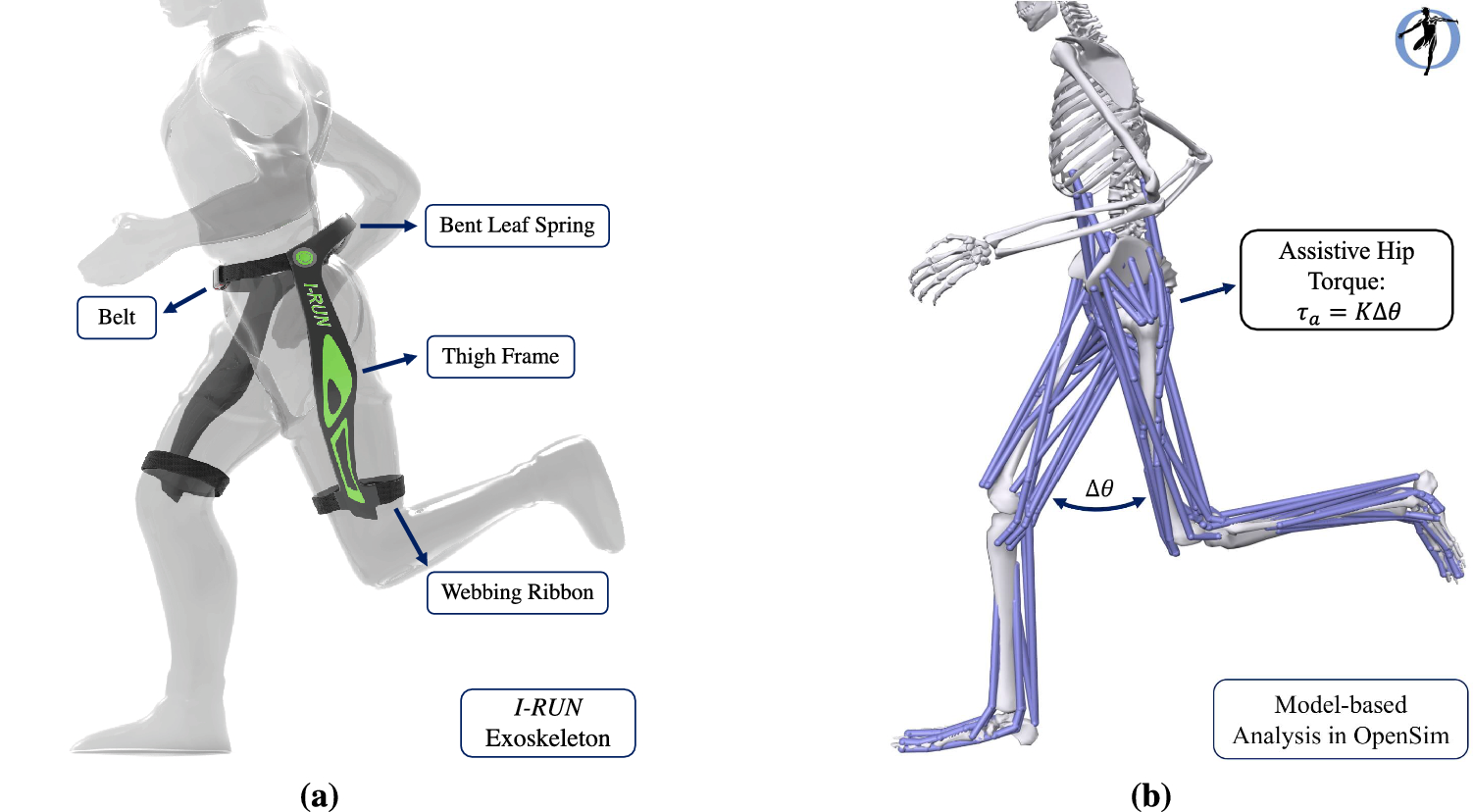
Simulation-based biomechanical assessment of unpowered

Alborz AGHAMALEKI SARVESTANI, R&D Scientist, Master of Science, ABB, Zürich, ABB, A1

Felix RUPPERT, Ph.D Student, Master of Science, Max Planck Institute for Intelligent Systems, Stuttgart, IS, Dynamic locomotion group

Robots' physical environment

Mechanism, Actuation, Perception, and Control of Highly Dynamic

Block diagram of the controller. The SEA is torque-controlled
Frontiers Closed-Loop Torque and Kinematic Control of a Hybrid
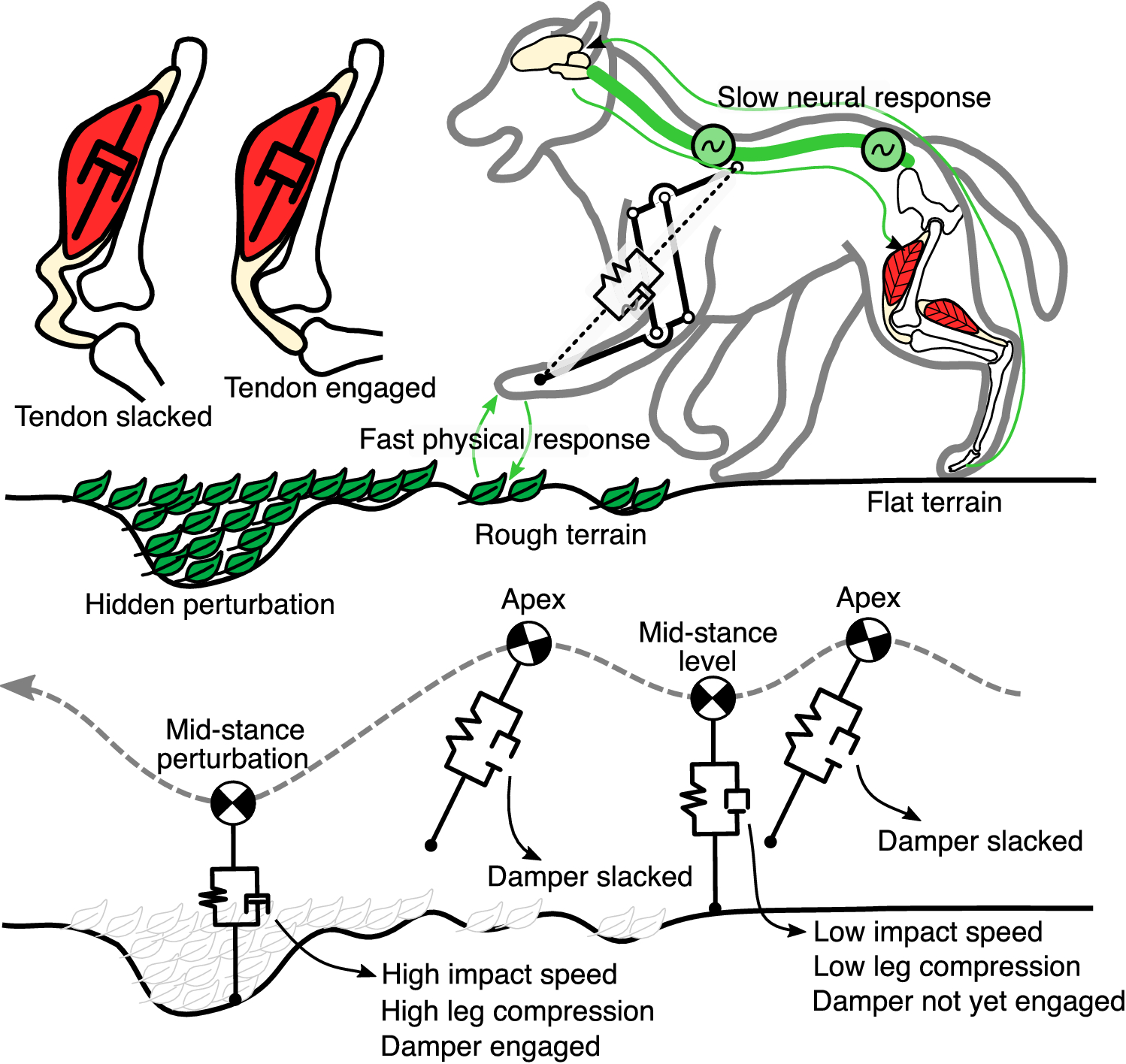
Slack-based tunable damping leads to a trade-off between

CAD design of the test bench for the HyQ Leg prototype.

Sensors, Free Full-Text