The final design constrains gripper travel using a pair of bearing

By A Mystery Man Writer
Download scientific diagram | The final design constrains gripper travel using a pair of bearing shafts. from publication: Axiomatic Design of a Linear Motion Robotic Claw with Interchangeable Grippers | Reykjavik University's electronic lab has a five-axis CRS Robotics A255 arm used in laboratory exercises that are in need of an improved claw. The current claw limits the robot arm operation duration and dexterity due to its bulk. In addition, the grippers don’t provide a | Axiomatic Design, Robotics and Physical Exercise | ResearchGate, the professional network for scientists.

Design of the Arm Exoskeleton ABLE Achieving Torque Control Using Ball Screw and Cable Mechanism - ScienceDirect

Joseph FOLEY, Professor (Assistant), PhD, Reykjavik University, Reykjavík, School of Science and Engineering
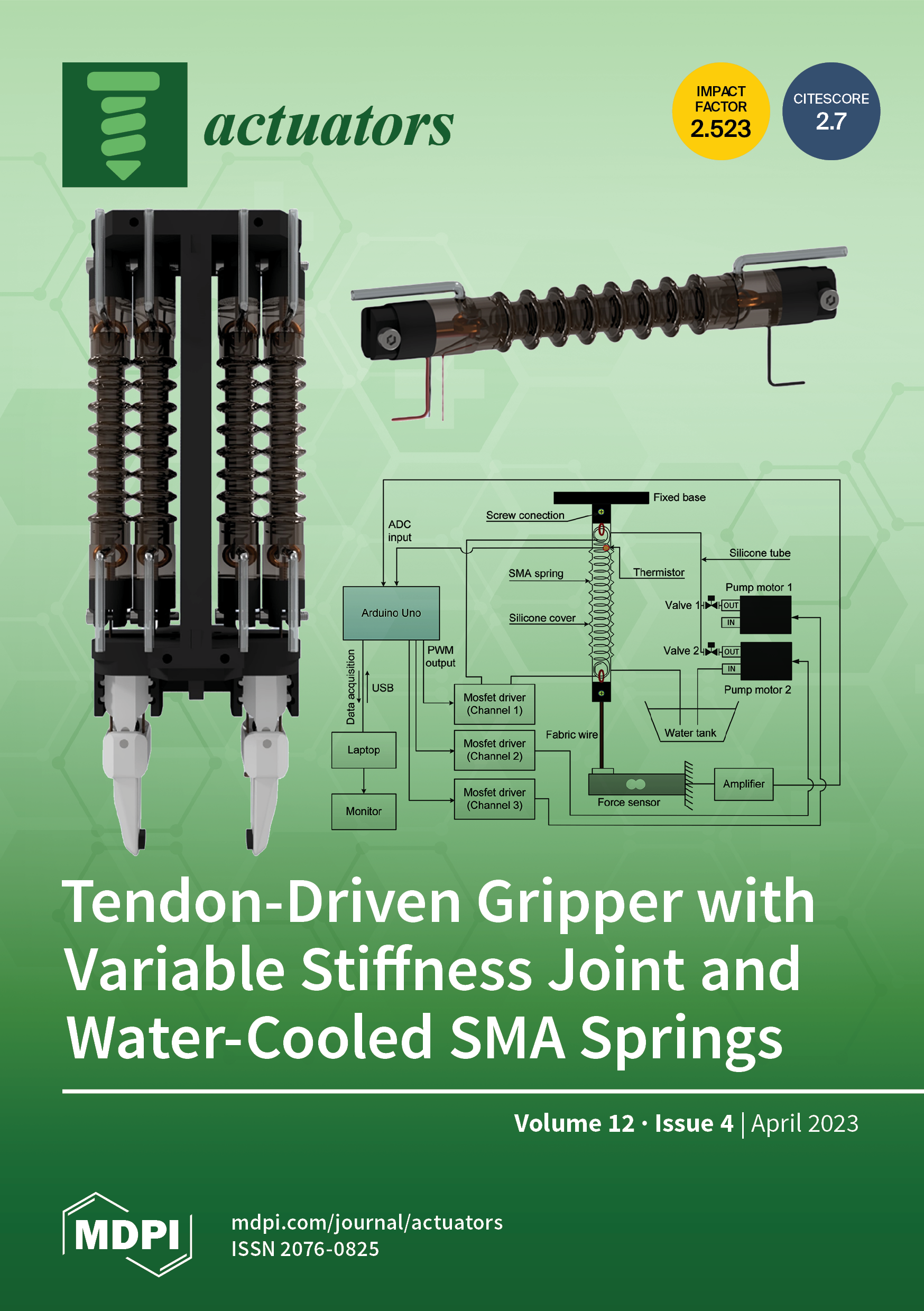
Actuators April 2023 - Browse Articles
La mission Insight - SEIS / Mars InSight

Robotics, Free Full-Text

How ornithopters can perch autonomously on a branch

The final design constrains gripper travel using a pair of bearing

US11207065B2 - Method for fabricating surgical stapler anvils - Google Patents

Sensor Fusion: Spatial Reasoning and Scene Interpretation, (1989), Publications

Active debris removal: A review and case study on LEOPARD Phase 0-A mission - ScienceDirect

Harnessing the nonlinear properties of buckling inflatable tubes for complex robotic behaviors - ScienceDirect

Reactivity and statefulness: Action-based sensors, plans, and necessary state - Grace McFassel, Dylan A Shell, 2023

Cosmoclench Gripper, PDF, Screw

Kinematics analysis and trajectory planning of a continuum manipulator - ScienceDirect

Cosmoclench Gripper, PDF, Screw
- Guide Gear Women's Cozy Gripper Socks, 3 Pairs - 612777, Socks at Sportsman's Guide

- Gripjoy Socks Men's Black Diabetic Socks With Grippers X3 Pairs - 1 Pack (3- pairs) - Black 1 Pack - 115 requests

- Wells Lamont Ultimate Gripper PU-Coated Work Gloves, 3 Pair, Large
- 2 Pairs Ice Grip Traction Cleats 10 Steel Cleats for Walking on

- Black Dymond Gripper Pegs - Accent Cut (1-Pair) - SPYDERPOPS


- 32 Degrees Heat Women's Super-Soft Joggers 2XL Heather White Free

- MILO BAUGHMAN STYLE ETAGERE DISPLAY SHELF UNIT. E

- Fabilicious - SaleSale Sale. #fabiliciousfashion #bridalwear #indianwedding #london #indianweddings #northwood #sarees #indiansuit #bridalcollections #lehenga #whatsappshopping #womanentrepreneur #wedding #weddingseason
- Tweens - Buy Tweens Bras & Tweens Lingerie Online in India (Page 7)

- Ribbed Scoop Neck Long Sleeve Bodysuit with Lace Up Back Detail- Assor – Heartbreak Boutique

