WEVJ, Free Full-Text
By A Mystery Man Writer
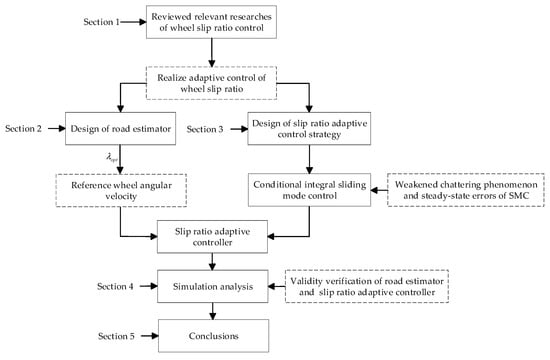
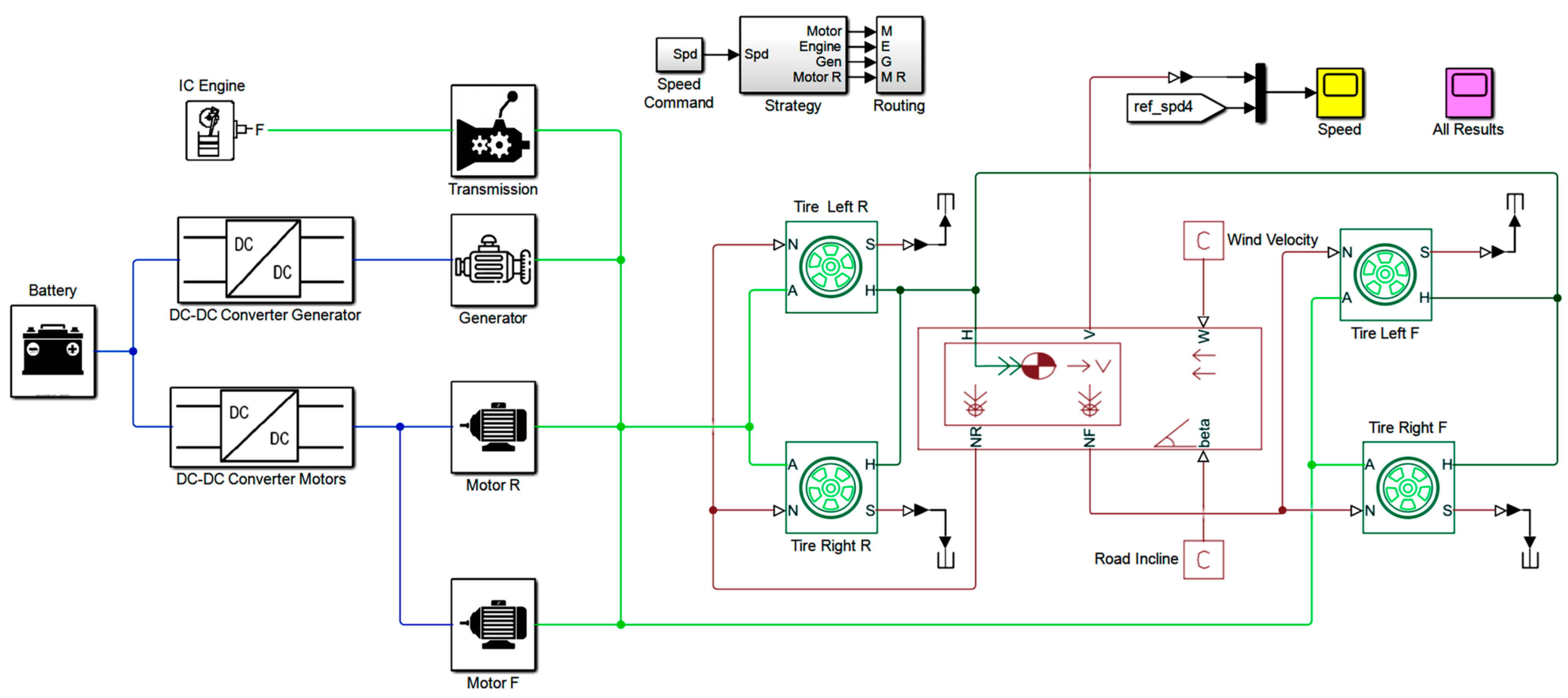
In order to solve the adaptability problem of acceleration slip regulation for distributed drive electric vehicles, a slip ratio adaptive control strategy based on wheel angular velocity is proposed. The principle of road estimation algorithm based on the Burckhardt tire model is analyzed, and an improved estimation principle for optimal slip ratio is designed to improve the speed and accuracy of optimal slip ratio estimation. A slip ratio control strategy based on a conditional integral sliding mode control is designed, and its stability is proven. To make the slip ratio control strategy have better practicability, the slip ratio control strategy is combined with the road estimation algorithm, and the control variable of the slip ratio adaptive control strategy based on a conditional integral sliding mode control is redesigned to obtain a faster vehicle dynamic response. Finally, the effectiveness of the designed road estimation algorithm and the slip ratio adaptive control strategy is verified by simulation of acceleration on joint road and split road. Results show that the designed road estimator can obtain the road adhesion coefficient and optimal slip ratio quickly and accurately; the slip ratio adaptive controller, based on a conditional integral sliding mode control, can maintain the wheel slip ratio near the optimal slip ratio and reduce the steady-state error of the wheel slip ratio.
Technical Feasibility of Heavy-Duty Battery-Electric Trucks for Urban

50 Future EVs Worth Waiting For, evs
WEVJ, Free Full-Text
WEVJ, Free Full-Text

Webasto Charging Systems, Inc. Continues to Advance Ground Support
Germany: Let's Go Laser Die Cut, significa let's go em português

This year it's a slow crawl to financial aid packages for students
WEVJ, Free Full-Text

Driving an electric vehicle in Pennsylvania: range anxiety
WEVJ, Free Full-Text
WEVJ, Free Full-Text

File:Webasto Logo.jpg - Wikimedia Commons, webasto
WEVJ, Free Full-Text




- Bath & Body Works Fine Fragrance Body Mist Spray 8 fl oz - NEW - Pick Your Scent

- Doll Silhouette” Necklace

- Vintage Adidas Mens Track Jacket Black 90s Original Sport Casual Full-Zip Soccer

- Collections Etc Exquisite Form Support Bra With Moveable Pads 34d Black Balconette Bra : Target
- Jorge Carneiro assume a presidência do grupo SAGE no Brasil - Mercado Comum: Jornal on-line BH - Cultura - Economia - Política e Variedades

