Micromachines, Free Full-Text
By A Mystery Man Writer
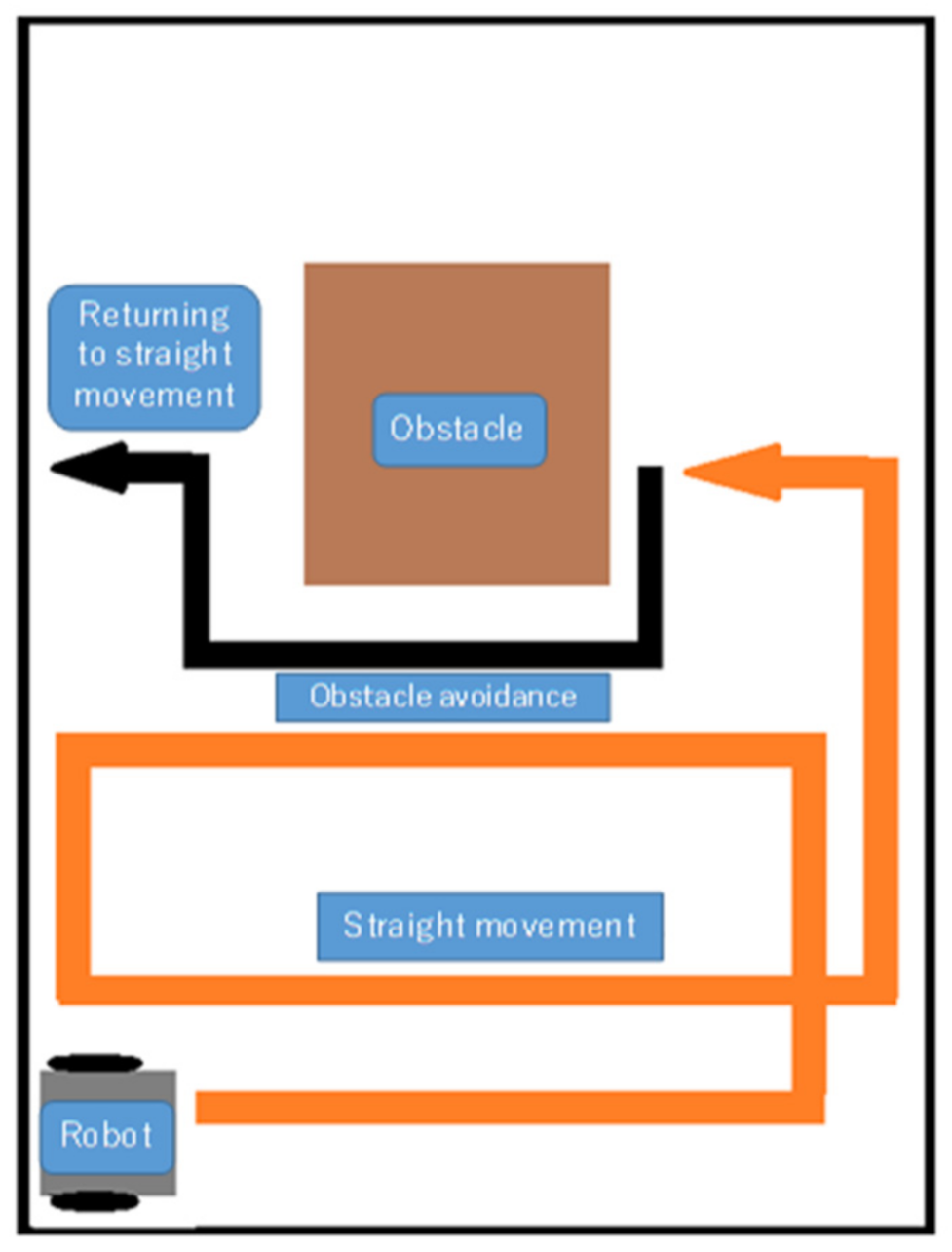
Several robot-related studies have been conducted in recent years; however, studies on the autonomous travel of small mobile robots in small spaces are lacking. In this study, we investigate the development of autonomous travel for small robots that need to travel and cover the entire smooth surface, such as those employed for cleaning tables or solar panels. We consider an obstacle-available surface and target this travel on it by proposing a spiral motion method. To achieve the spiral motion, we focus on developing autonomous avoidance of obstacles, return to original path, and fall prevention when robots traverse a surface. The development of regular travel by a robot without an encoder is an important feature of this study. The traveled distance was measured using the traveling time. We achieved spiral motion by analyzing the data from multiple small sensors installed on the robot by introducing a new attitude-control method, and we ensured that the robot returned to the original spiral path autonomously after avoiding obstacles and without falling over the edge of the surface.

Micromachines An Open Access Journal from MDPI
Micromachines, Free Full-Text
Micromachines, Free Full-Text, mdpope 1-3
Overview of Rubik's Cube and Reflections on Its Application in
Micromachines Free Full-Text Ink-Jet Printing Of Micro-Electro

PDF) High-power visible laser effect on a Boston Micromachines' MEMS deformable mirror
2024 Significance & effect sizes - Micromachines Free Full-Text
Micromachines, Free Full-Text
Manufacturing of the surfaces of spline fitting connection The

Micro Machines (NES) - The Cutting Room Floor

Mint Disc Playstation 2 Ps2 Micro Machines V1 First Game 1 I – Inc Manual - Starboard Games
Attacking bacteria with shark skin-inspired surfaces - American

Four-dimensional direct laser writing of reconfigurable compound micromachines - ScienceDirect

Download Micro Machines

What Is MicroLED And Its Advantages? - Applications, micro led




- NEW BRAUN 32B SERIES 3- 350cc 350 340 330 320 Shaver/Razor FOIL+

- Thom Browne's Menswear Show Involved a Lot of Jock Straps - Go Fug Yourself - Thom Browne's Menswear Show Involved a Lot of Jock Straps Go Fug Yourself

- Best Quotes of Day on X: Stop calling it a dream. It's time to call it a plan. - Unknown Author #BestQuotesoftheDay #GetMotivated #Inspirational #WordsofWisdom #WisdomPearls / X
- Camisa Seleção Brasileira Lançamento 2023 - Roupas - Vila Moreira, São José do Rio Preto 1235764733

- Pocket Sport, Board Game
