Energies, Free Full-Text
By A Mystery Man Writer
In this paper, a robust wheel slip control system based on a sliding mode controller is proposed for improving traction-ability and reducing energy consumption during sudden acceleration for a personal electric vehicle. Sliding mode control techniques have been employed widely in the development of a robust wheel slip controller of conventional internal combustion engine vehicles due to their application effectiveness in nonlinear systems and robustness against model uncertainties and disturbances. A practical slip control system which takes advantage of the features of electric motors is proposed and an algorithm for vehicle velocity estimation is also introduced. The vehicle velocity estimator was designed based on rotational wheel dynamics, measurable motor torque, and wheel velocity as well as rule-based logic. The simulations and experiments were carried out using both CarSim software and an experimental electric vehicle equipped with in-wheel-motors. Through field tests, traction performance and effectiveness in terms of energy saving were all verified. Comparative experiments with variations of control variables proved the effectiveness and practicality of the proposed control design.
A Complete Guide To Build A Joe Cell, Orgone Energy 2012 : Free Download, Borrow, and Streaming : Internet Archive

Free Energy All living systems require constant input of free energy. - ppt download

Energies An Open Access Journal from MDPI
Energies, Free Full-Text
Sustainability, Free Full-Text, icq invite 18

Infographic: 5 Advantages of the Total Home Energy System

Sustainable Energy for All
ENERGY, Free Full-Text
Energies, Free Full-Text, pengguna kilo kilo no mi

Energies An Open Access Journal from MDPI
Energies, Free Full-Text, pengguna kilo kilo no mi
Energies, Free Full-Text, rated speed
- 100DVFSS - 1 in. DVF Series Inline Plastic Residential Irrigation Valve with Flow Control - Slip x Slip

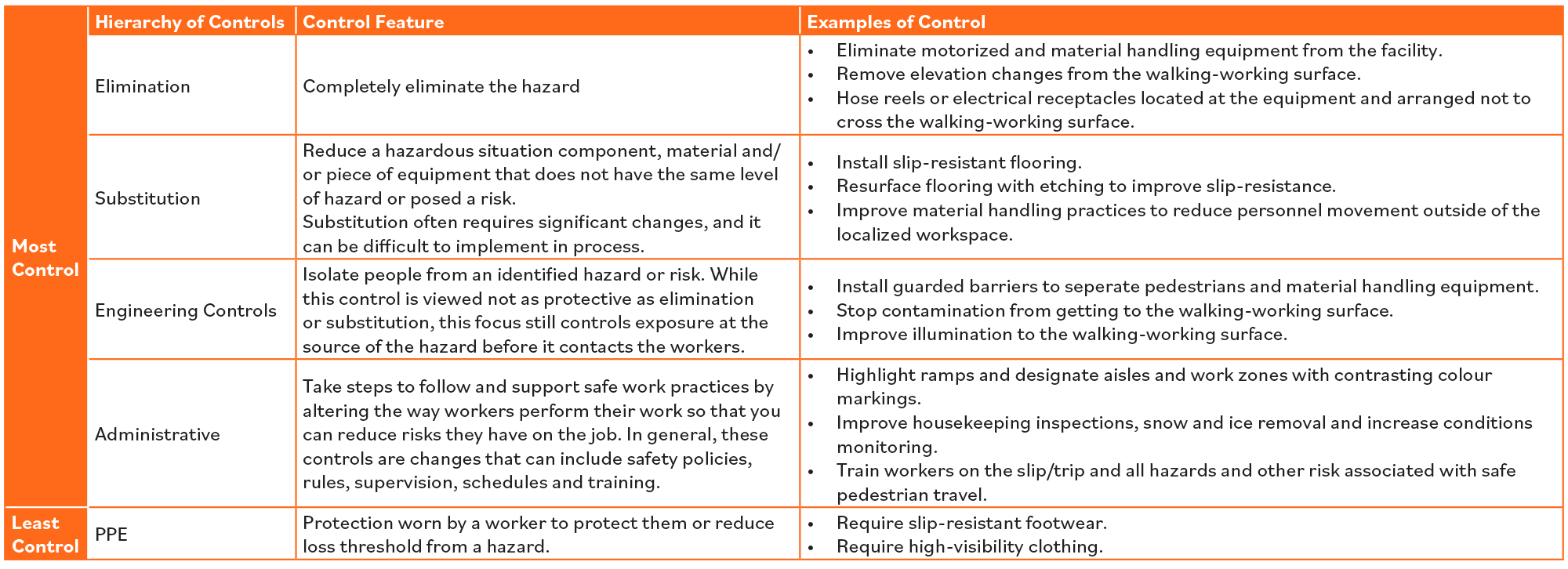
- Slips, Trips and Falls Prevention: Using the Hierarchy of Controls and Continuous Improvement
- Ferrari Great Innovations: the E-diff and Side Slip Control Ferraris are made up of a complex network of components and algorithms. While the engine may be at the heart of it
- Janome America: World's Easiest Sewing, Quilting, Embroidery Machines & Sergers

- PlayVital Black Pure Series Anti-Slip Silicone Cover Skin for PS5 Cont – playvital


- NWT TORRID ACTIVE SIZE 0 (L-12) BLACK STRAPPY WICKING SPORTS BRA

- Penti High Waist Thermal Opaque Warm Fleece Lined Leggings Footless Tight (Small) Black at Women's Clothing store

- Ready Stock】 Gratlin Women's Lightly Padded Wirefree Maternity Nursing Bra Full Coverage A054
- Cache Coeur Nude magnetic nursing bra

- Willit Women's Outdoor Skort Golf Skort Casual Skort Skirt UPF 50+ Quick Dry Zip

