Applied Sciences, Free Full-Text
By A Mystery Man Writer
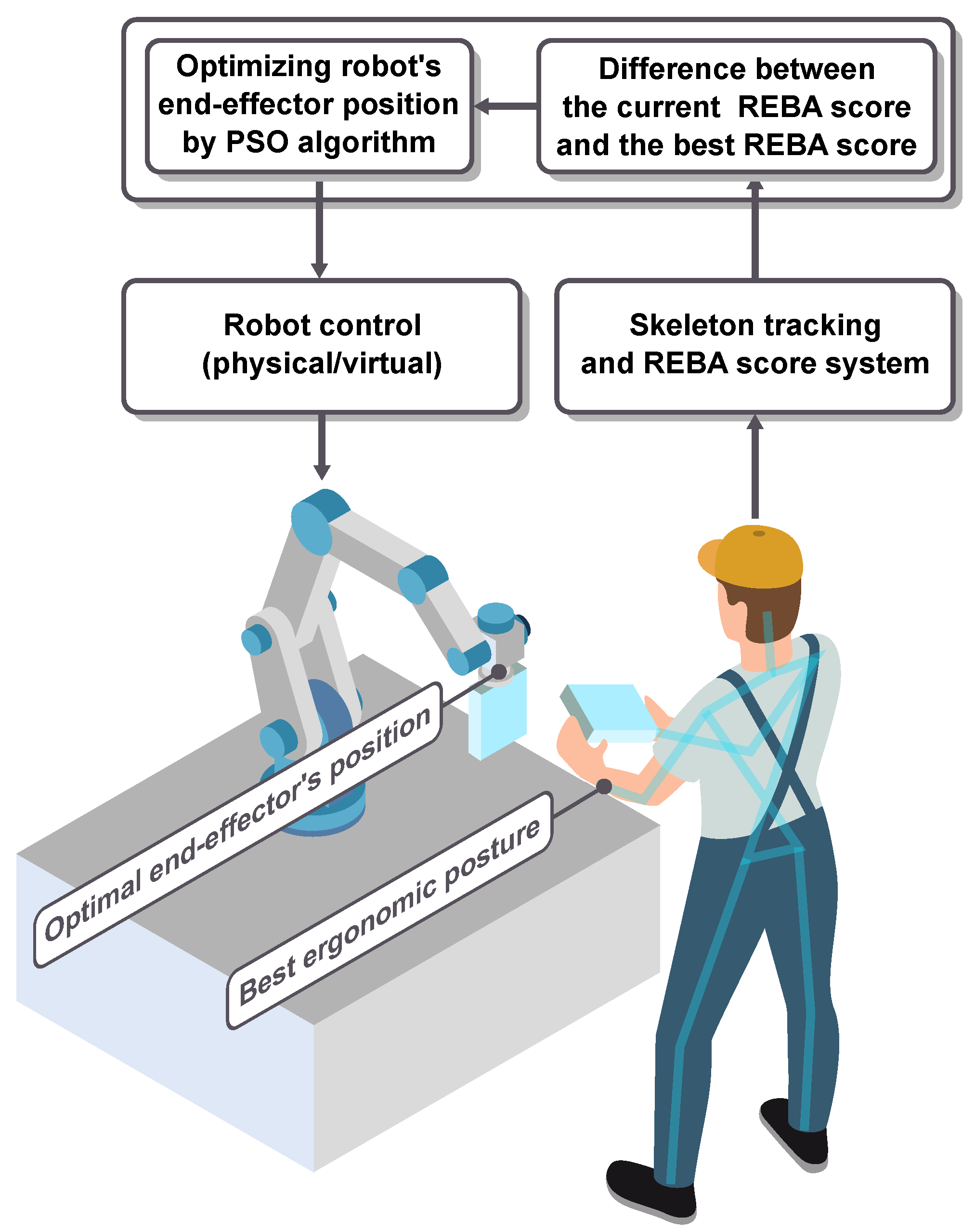
Musculoskeletal disorders caused by poor work posture are a serious concern in the industry since they lead to absenteeism and medical leave from work. In the context of human–robot collaboration, this issue can be mitigated if collaborative robots support human workers to perform their tasks more ergonomically. In this work, we propose a method to optimize human posture during human–robot collaboration using the Particle Swarm Optimization (PSO) algorithm. Our approach involves assigning an appropriate location to the robot’s end-effector to minimize the distance between the optimized posture of the human and their current posture in the working space. To measure human posture, we use the Rapid Entire Body Assessment score (REBA) calculated from body joint angles captured by a Kinect camera. To validate the effectiveness of our proposed method, we conducted a user study with 20 participants in a virtual reality environment. The PSO algorithm could position the robot end-effector to the optimal position close to real time. Our results showed that our method could improve ergonomics by 66%, indicating its potential for use in human–robot collaborative applications.

Academics, Master's Degrees, Applied Analytics Master of Science in Applied Analytics
Applied Sciences, Free Full-Text, press fit

Applied Sciences, Free Full-Text, super surf 1.99
Applied Sciences, Free Full-Text, driving simulator 2009

Applied Sciences, Free Full-Text, shotgun king igg
Applied Sciences, Free Full-Text, arras io sandbox commands
Applied Sciences, Free Full-Text, laser breadboard kit
Applied Science
Applied Sciences, Free Full-Text, rated speed
Applied Sciences, Free Full-Text, driving simulator 2009
Applied Sciences, Free Full-Text, kurnik copas
Applied Sciences, Free Full-Text, draw speed coil forbidden west location
Applied Sciences, Free Full-Text, mining blocker chrome extension
- Ortho Active Front Closure Posture Corrector

- Front Closing Bras - Shop Front Closing Bras Australia Wide - Curvy

- Womens Front-Closure Posture Bras Bras - Underwear, Clothing
- Posture Correction Front-Close Bra, Adjustable Support Multifunctional Bra,Adjustable Chest Brace Support (A/1,XXXL) : : Clothing, Shoes & Accessories

- Women's Full Coverage Non-padded Wire Free Front Closure Posture Bra Plus Size X Bcak Plus Size 46 48 D E F G - AliExpress


- marks and spencer Sz 20 Grey Thermal Leggings Extra Warmth Bnwt

- Wholesale vintage style nylon panties In Sexy And Comfortable Styles

- Korean Womens Long Dresses Summer Bathrobe Pajama Set Sexy Slip Dress Slips For Nightwear And Fancy Occasions L230626 From Fadacai10, $7.99

- wofedyo Boxers for Men, Men's Sexy Underwear Boxer Briefs Mesh Breathable Underpants Mens Mesh Shorts See Through with Large Split Mens Boxer Briefs

- momcozy Nursing Bra Beige : : Baby Products
